GAMES101 - 01 to 04
Source
- 视频:https://www.bilibili.com/video/BV1X7411F744?share_source=copy_web
- 资料:https://sites.cs.ucsb.edu/~lingqi/teaching/games101.html
Lecture 01 Overview of Computer Graphics
- 讲了图形学的应用,比如游戏、电影特效、动画、仿真、VR 等等;
- 101 主要包括四个部分:
- 光栅化(opengl 和 shader 是怎么运作的)
- 曲线和栅格
- 光线追踪
- 动画 & 模拟
- 不会讲图形库 api,如 opengl,其实就是原理性的东西;
Lecture 02 Review of Linear Algebra
图形学包括很多学科的内容
- 数学:线性代数、微积分、统计学;
- 物理:力学、光学;
- 其它:信号处理、数值分析;
- 一定的审美能力;
向量标准化
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='278'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(557,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='499'%20y='34'%3e%3c/use%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='1086'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='1365'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) 是指向量 a 的长度,长度为 1 的向量规定为 单位向量 ;
是指向量 a 的长度,长度为 1 的向量规定为 单位向量 ;- 单位向量可以表示为:
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-5E'%20x='14'%20y='19'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='807'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(1863,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='499'%20y='34'%3e%3c/use%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMAIN-2F'%20x='2393'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='2893'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='3172'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(3450,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='499'%20y='34'%3e%3c/use%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='3980'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='4258'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ,即单位向量=向量/向量长度;
,即单位向量=向量/向量长度; - 通常可以用一个单位向量表示方向;
- 会有一些向量的计算,比如求两个向量的和,也就是把两个向量的头尾坐标相加,即可获得结果向量;
向量加法
一般表示为 A=4x+3y 这样的形式,因为这样 容易计算向量的长度 (勾股定理),貌似这个很重要;
向量乘法-点乘(Vector Multiplication - Dot Product):
- 一般表示为
 ;
; - 右边是向量长度和夹角的数字乘法,因此可以将等式转换成这样
 ,可以发现点乘非常大的价值就是求向量夹角余弦值;
,可以发现点乘非常大的价值就是求向量夹角余弦值; - 假如已知的向量是单位向量(长度为 1),那求夹角就更简单了
 ;
; - 点乘满足 交换律、结合律、分配律 ;
- 计算方法 :
 ;
; - 应用上,除了刚才提到的计算 两个向量的夹角 ,还有就是可以计算一个向量到另一个向量的 投影向量长度 ;
- 含义上,点乘可以测量两个两个向量有多么接近、分解向量、还可以判断某两个向量的方向关系(相同、相反、垂直);
向量乘法-叉乘(Vector Multiplication - Cross Product):
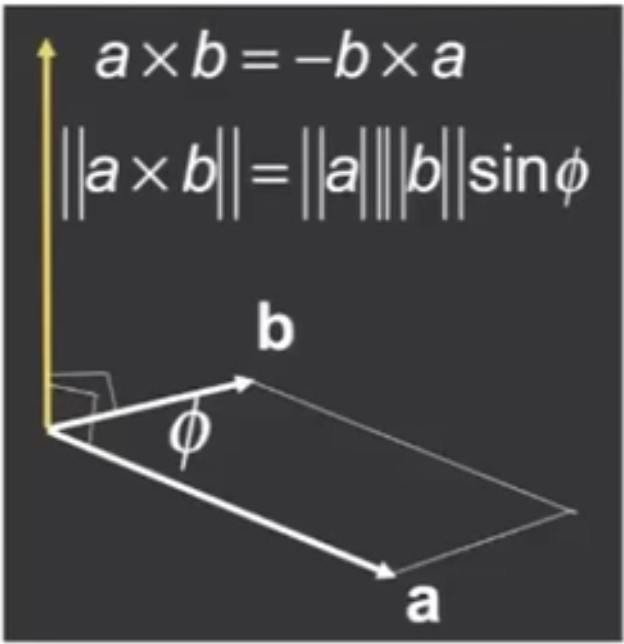
- 意味着求 a 和 b 所在平面的一个法向量,法向量的方向满足右手螺旋定则,即用右手四指表示从 a 旋转到 b 的方向,然后拇指所指方向就是这个法向量的方向;
- 公式:
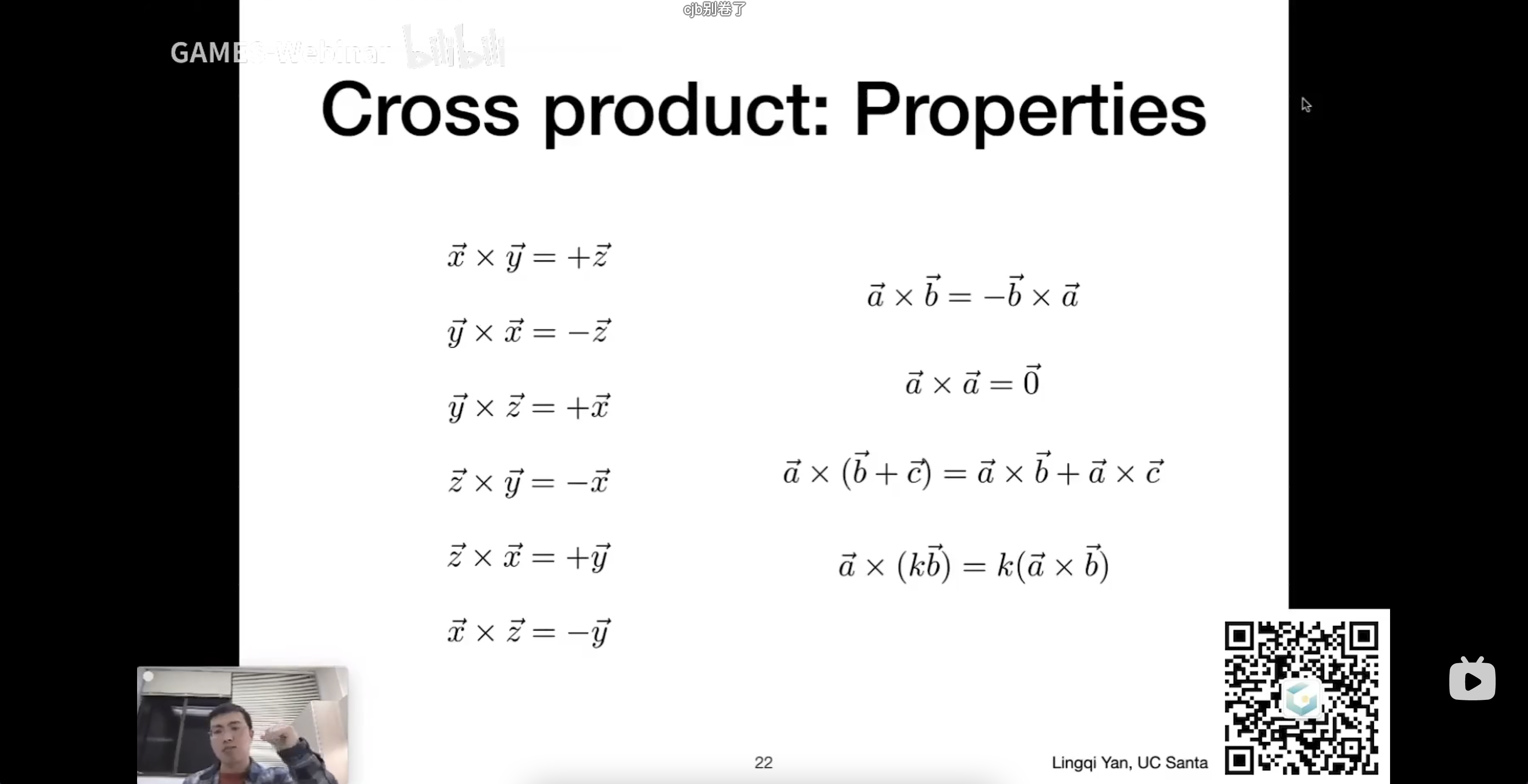
- 交换律
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-D7'%20x='751'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-62'%20x='1752'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='2459'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2212'%20x='3516'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-62'%20x='4294'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-D7'%20x='4946'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='5946'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) :根据右手旋转坐标系,从 a 旋转到 b 和从 b 旋转到 a 获得的法向量是相反的,可得叉乘不满足交换律,要交换必须给其中一个向量加一个负号(可以根据 x 和 y 轴算出 z 轴,从而建立一个直角坐标系);
:根据右手旋转坐标系,从 a 旋转到 b 和从 b 旋转到 a 获得的法向量是相反的,可得叉乘不满足交换律,要交换必须给其中一个向量加一个负号(可以根据 x 和 y 轴算出 z 轴,从而建立一个直角坐标系); - **结果向量长度 **
 :向量叉乘结果向量的长度,等于两个向量长度相乘再乘上两个向量夹角的正弦;
:向量叉乘结果向量的长度,等于两个向量长度相乘再乘上两个向量夹角的正弦; - 同方向单位向量的叉积
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='499'%20y='34'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-D7'%20x='751'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(1752,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='499'%20y='34'%3e%3c/use%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='2559'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(3616,0)'%3e%3cuse%20xlink:href='%23E1-MJMAIN-30'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='485'%20y='259'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) :同方向的向量叉乘会得到一个 0 向量;
:同方向的向量叉乘会得到一个 0 向量; - 结合律、分配律 :除了交换律需要加个负号之外,结合律、分配律都是满足的;
- 矩阵形式 :叉积可以表现成矩阵形式
 ,这个三阶矩阵视频里叫做 dual matrix of vector a,翻译好像叫 a 的对偶矩阵?不知道是啥意思,然后这个矩阵乘出来的向量就是
,这个三阶矩阵视频里叫做 dual matrix of vector a,翻译好像叫 a 的对偶矩阵?不知道是啥意思,然后这个矩阵乘出来的向量就是  ;
;
- 作用:
- 判断向量的左右位置:右手螺旋定则,如果
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='499'%20y='34'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-D7'%20x='751'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(1752,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-62'%20x='20'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='470'%20y='287'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 的结果是正的,那 a 肯定在 b 右边,反之亦然。比如给你三个点,组成一个三角形,要求一个点 P 是否在三角形内。那只要求三条边分别与三个点和 P 连线的向量之叉积,就可以判断三条连线是否都在边的左边,从而可以判断 P 是否在三角形内;
的结果是正的,那 a 肯定在 b 右边,反之亦然。比如给你三个点,组成一个三角形,要求一个点 P 是否在三角形内。那只要求三条边分别与三个点和 P 连线的向量之叉积,就可以判断三条连线是否都在边的左边,从而可以判断 P 是否在三角形内; - 判断法向量的内外;
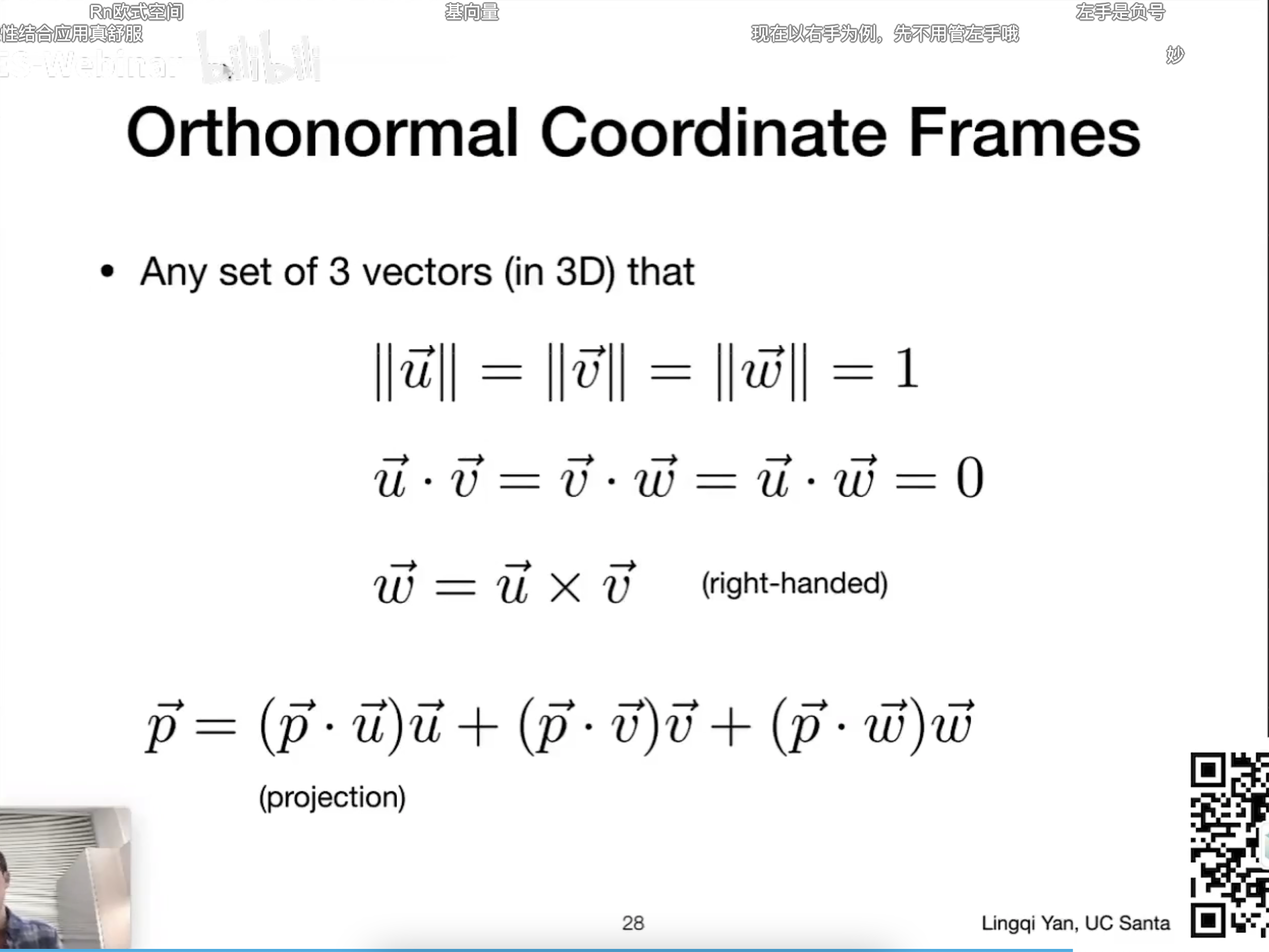
 :给了个公式,u、v、w 是三个互相垂直的单位向量,构成一个三维的直角坐标系,然后说可以通过点乘求任意向量在坐标轴上的投影,但是没太懂;
:给了个公式,u、v、w 是三个互相垂直的单位向量,构成一个三维的直角坐标系,然后说可以通过点乘求任意向量在坐标轴上的投影,但是没太懂;- 搜了一下理解了,其实这里是通过求得三个投影向量,最后相加得出原向量 p。首先 u、v、w 是三个坐标轴上的单位向量,回想之前点乘的公式
 ,用在此处就是
,用在此处就是 ,u 是坐标轴上的单位向量,长度为 1,可得
,u 是坐标轴上的单位向量,长度为 1,可得 ,cosθ 又等于邻边比斜边,
,cosθ 又等于邻边比斜边,'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='278'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(557,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-70'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='570'%20y='36'%3e%3c/use%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='1127'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-7C'%20x='1406'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) 就是斜边长度,易得
就是斜边长度,易得'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-70'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='570'%20y='36'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-22C5'%20x='792'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(1293,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-75'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='549'%20y='35'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 就是向量 p 在 u 所在轴上的投影向量长度,而由于
就是向量 p 在 u 所在轴上的投影向量长度,而由于'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-75'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-20D7'%20x='549'%20y='35'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) 是坐标轴上的单位向量,因此给每一个分量乘上投影向量的长度,就可以得到投影向量本身,三个投影向量加起来就可以得到要求的向量 p;
是坐标轴上的单位向量,因此给每一个分量乘上投影向量的长度,就可以得到投影向量本身,三个投影向量加起来就可以得到要求的向量 p;
矩阵(Matrix)
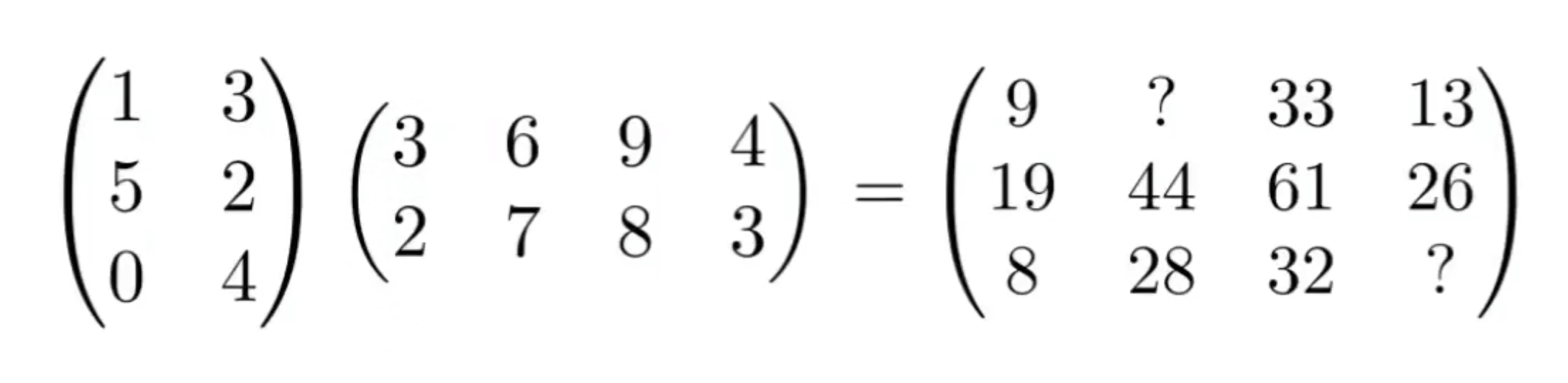
- 矩阵乘法 :
 ,只有矩阵 1 的列数和矩阵 2 的行数相同,矩阵乘法才有意义;
,只有矩阵 1 的列数和矩阵 2 的行数相同,矩阵乘法才有意义; - 计算积矩阵中 i, j 位置的值:直接求矩阵 1 第 i 行和矩阵 2 第 j 列的点积 ;
- 矩阵乘法 :交换律不成立,结合律和分配律都是成立的,尤其结合律比较有用;
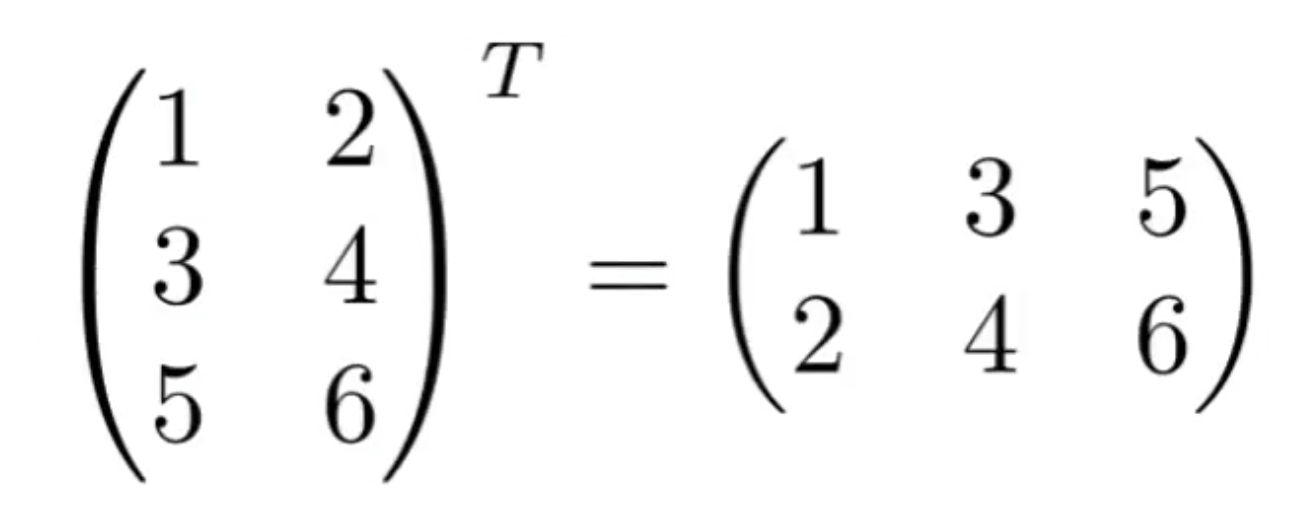
- 转置矩阵 :如图,有一个性质,矩阵积的转置等于其各自转置后调换顺序的积,
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMAIN-28'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='389'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-42'%20x='1140'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(1899,0)'%3e%3cuse%20xlink:href='%23E1-MJMAIN-29'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMATHI-54'%20x='550'%20y='583'%3e%3c/use%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='3164'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(4221,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-42'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMATHI-54'%20x='1074'%20y='583'%3e%3c/use%3e%3c/g%3e%3cg%20transform='translate(5578,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMATHI-54'%20x='1061'%20y='583'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) ;
;
- 单位矩阵 :
 ,它乘任何矩阵都等于矩阵本身;
,它乘任何矩阵都等于矩阵本身; - 逆矩阵 :结合单位矩阵,它有几个性质;
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='0'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(750,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='0'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(750,412)'%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2212'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-31'%20x='778'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='2783'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(3839,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='0'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(750,412)'%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2212'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-31'%20x='778'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='5594'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='6622'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-49'%20x='7678'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ,矩阵乘自己的逆矩阵等于单位矩阵;
,矩阵乘自己的逆矩阵等于单位矩阵;'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMAIN-28'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='389'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-42'%20x='1140'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(1899,0)'%3e%3cuse%20xlink:href='%23E1-MJMAIN-29'%20x='0'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(389,412)'%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2212'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-31'%20x='778'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='3571'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(4627,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-42'%20x='0'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(759,412)'%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2212'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-31'%20x='778'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3cg%20transform='translate(6391,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='0'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(750,412)'%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2212'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-31'%20x='778'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) ,与转置矩阵那个定理相同;
,与转置矩阵那个定理相同;
- 向量乘法转矩阵乘法 :
 ;
; ,这个
,这个'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2217'%20x='1061'%20y='583'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) 称为 dual matrix of A,暂时不清楚是怎么生成的;
称为 dual matrix of A,暂时不清楚是怎么生成的;
Lecture 03 Transformation
2D 变换(2D Transforms)
- 缩放(Scale)
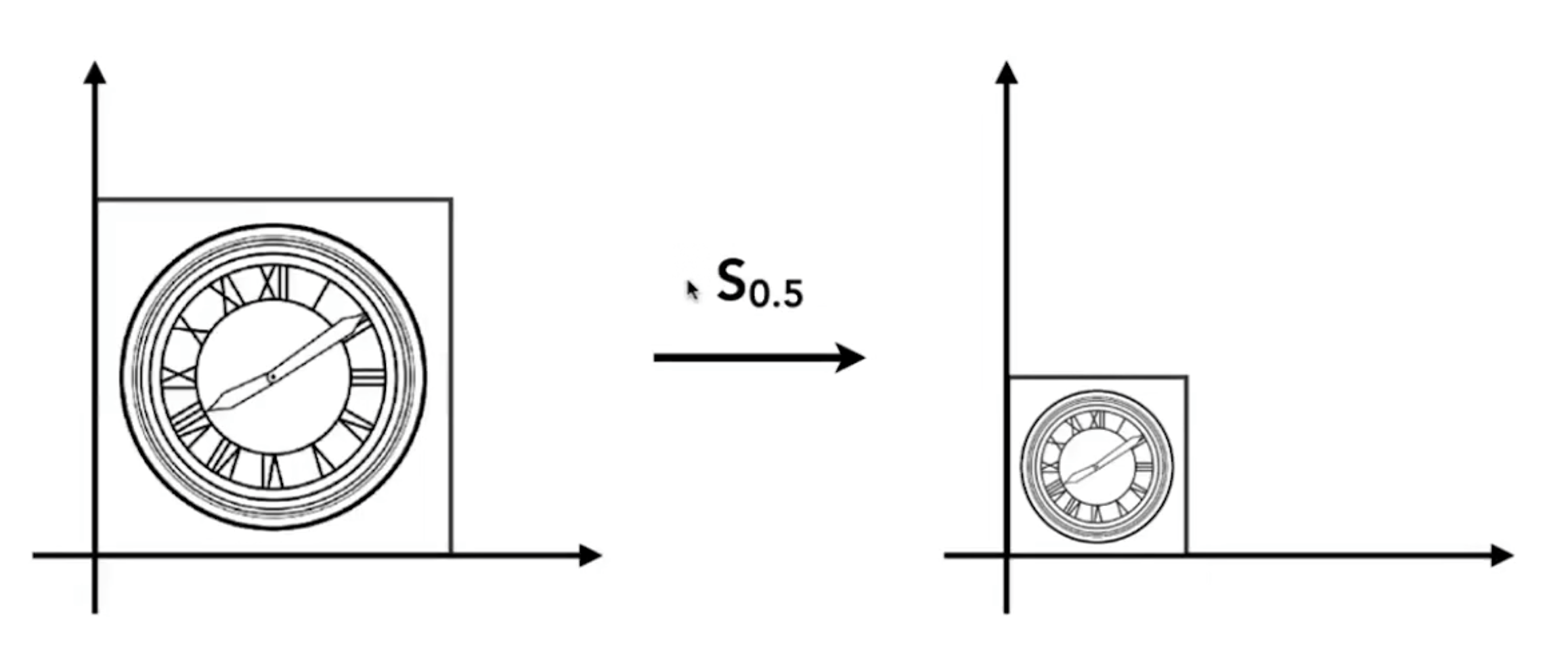
- 数学公式可以表达为:
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2032'%20x='809'%20y='583'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1145'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-73'%20x='2201'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='2670'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ,
,'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2032'%20x='706'%20y='583'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1072'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-73'%20x='2128'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='2598'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ,也就是 x、y 分别乘上缩放比例;
,也就是 x、y 分别乘上缩放比例; - 显然这个公式可以转换为矩阵形式:
 ,转换出来跟上面的数学公式是相同的;
,转换出来跟上面的数学公式是相同的;
- 切变(Shear)
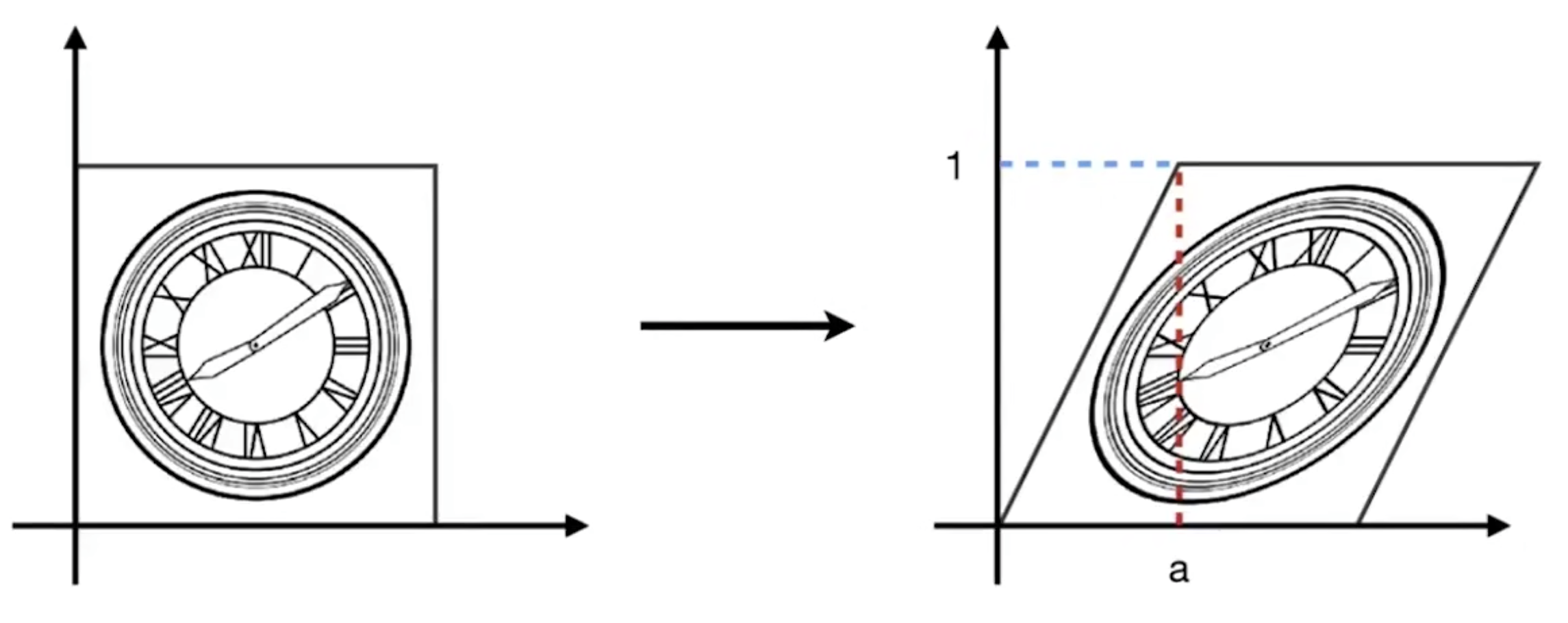
- 有点类似倾斜?webgl 那本书就没讲到这个,这里我们用图来推论它的公式;
- 显然,在变换前后,y 坐标是不变的;
- y = 0 时,x 坐标是没有发生变化的;
- y = 1 时,假设 x 坐标向右偏移了 a 距离,此时形状左端的 x 坐标为 a,右端的 x 坐标就是 a+1;
- 考虑到它是一个均匀的变化,当 y = 1/2 时,x 轴的偏移距离则为 a/2,形状左端的 x 坐标则为 a/2,右端的坐标则为 a/2+1;
- 此时我们推断数学公式:
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2032'%20x='809'%20y='583'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1145'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='2201'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2B'%20x='2996'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-61'%20x='3996'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='4526'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ,
,'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2032'%20x='706'%20y='583'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1072'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='2128'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ;
; - 转化为矩阵形式:
 ;
;
- 旋转(Rotate)
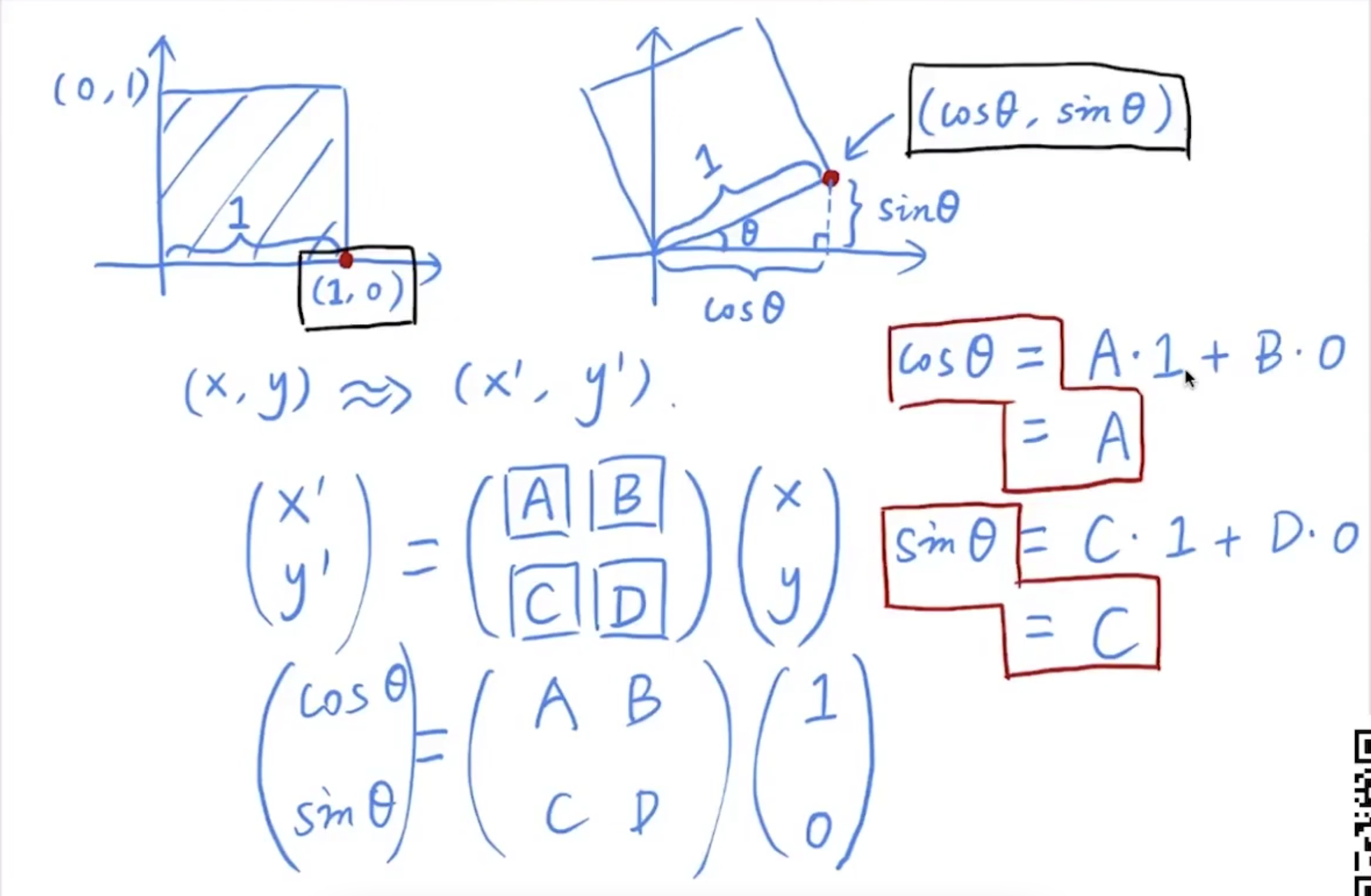
- 用一个特殊点来推断通用的公式,图示为点 (1, 0) 旋转 θ 角的情况,可得 cosθ 对应矩阵位置 A,sinθ 对应矩阵位置 C;同理 B 位置对应的是 -sinθ,D 位置对应的是 cosθ;
- 即:
 ;
;
- 推导:线性变化都可以用矩阵来表示,但我们必须找到一个相同维度的矩阵,也就是将其表示在同一个矩阵中,如何?
齐次坐标 (Homogeneous coodinates)
- 平移(Translation)
- 是最特殊的一种变换,因为它不能写成上面那些单纯的矩阵相乘形式,他必须加上一个常数;
- 因为它要加上常数,不能用乘法表示,所以 平移不属于线性变化 ;
- 人们不想把平移当成一种特殊用例,所以如何将它们都进行通用的表示呢?
- 数学公式:
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2032'%20x='809'%20y='583'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1145'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='2201'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2B'%20x='2996'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(3996,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-74'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMATHI-78'%20x='511'%20y='-213'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) ,
,'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2032'%20x='706'%20y='583'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1072'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='2128'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2B'%20x='2848'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(3848,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-74'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMATHI-79'%20x='511'%20y='-213'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) ;
; - 矩阵形式:
 ;
;
- 齐次坐标(Homogeneous coodinates)
- 根据平移的矩阵公式扩充为:
 ,这就是用齐次坐标表示平移的方式;
,这就是用齐次坐标表示平移的方式; - 探讨齐次坐标的意义;
- 第一,引入 w 分量来表示平移,其中需要区分向量和点的表示,向量表示为
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMAIN-28'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='389'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2C'%20x='962'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='1407'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2C'%20x='1904'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-30'%20x='2349'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-29'%20x='2850'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ,点表示为
,点表示为'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMAIN-28'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='389'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2C'%20x='962'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='1407'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2C'%20x='1904'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-31'%20x='2349'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-29'%20x='2850'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ,这是因为新引入的维度是用来表示平移的,而 向量具有平移不变性 ,所以不需要考虑它的平移属性,置为 0 即可;
,这是因为新引入的维度是用来表示平移的,而 向量具有平移不变性 ,所以不需要考虑它的平移属性,置为 0 即可; - 第二,w 分量还包含点、向量之间加减法的实际意义,比如:
 ,他们加出来 w 分量仍是 0,也表示向量,符合向量加法的原理;
,他们加出来 w 分量仍是 0,也表示向量,符合向量加法的原理; ,结果 w 分量是 1,表示一个点,含义是点朝某个方向移动,结果仍是一个点;
,结果 w 分量是 1,表示一个点,含义是点朝某个方向移动,结果仍是一个点; ,结果分量是 0,表示一个向量,含义是两点之间的连线可以表示一个方向,也符合坐标减法的原理;
,结果分量是 0,表示一个向量,含义是两点之间的连线可以表示一个方向,也符合坐标减法的原理; ,比较特殊,因为这样加起来 w 分量会变成 2,后来人们给了它一个定义,就是将三个分量同时除以 w,得到
,比较特殊,因为这样加起来 w 分量会变成 2,后来人们给了它一个定义,就是将三个分量同时除以 w,得到 ,突然发现这不就是表示,两点相加,得到的就是线段中点?笑死;
,突然发现这不就是表示,两点相加,得到的就是线段中点?笑死;
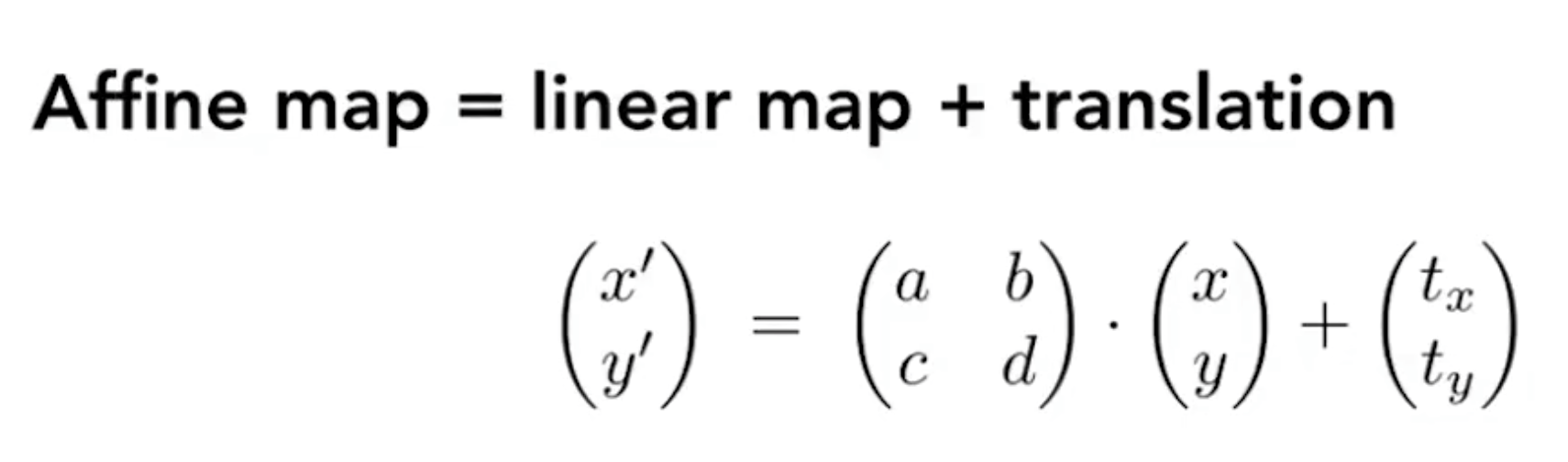
仿射变换(Affine Transformations)
- 仿射变换(Affine Transformations)
- 线性变化(旋转、切变、缩放)+平移,给他一个新名字叫做 仿射变换 ;
- 用齐次坐标表示仿射变换:
 ;
;
- 逆变换(Inverse Transform)
- 逆变换反应到数学上,就是乘上变换的逆矩阵;
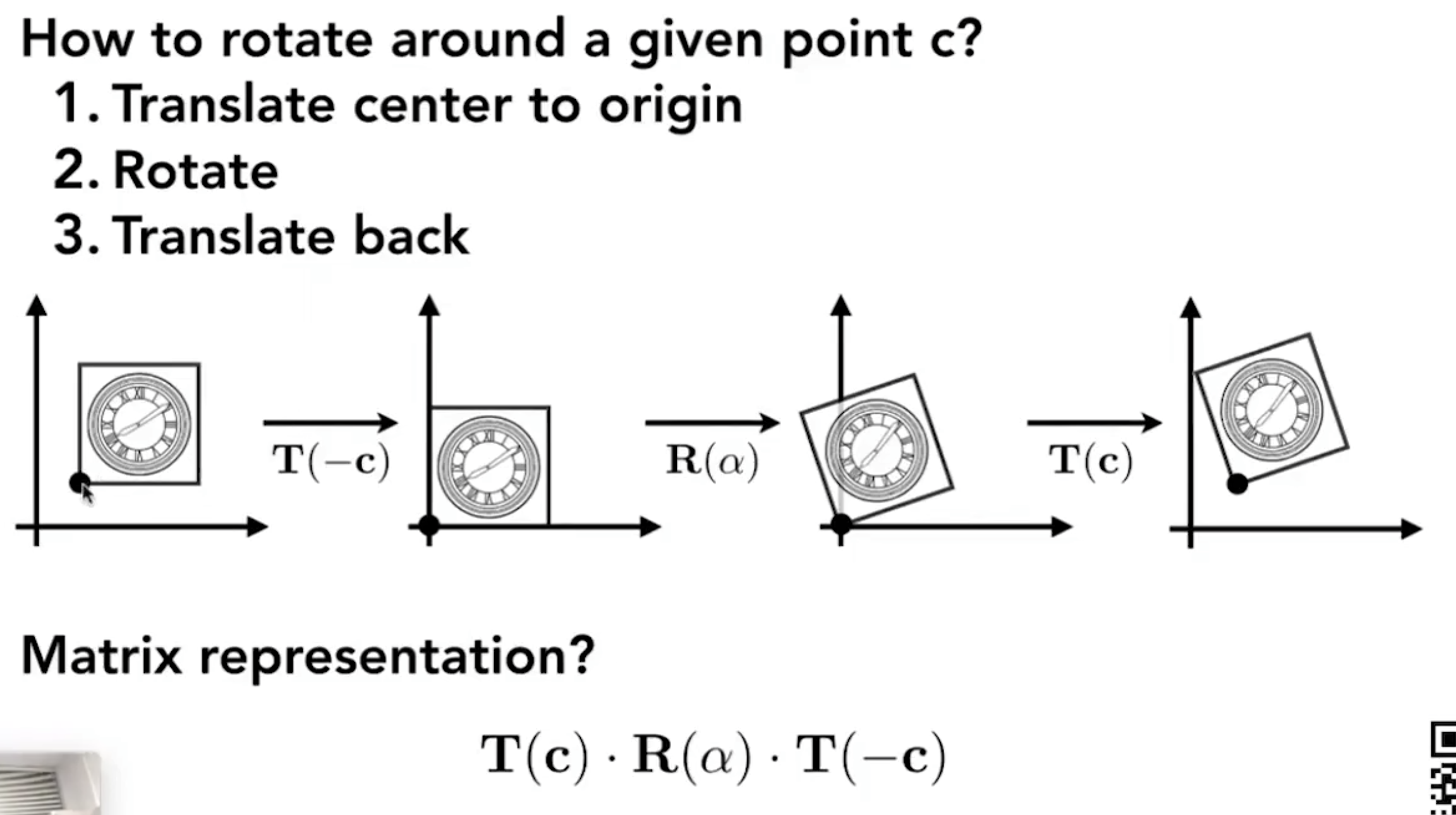
- 复杂变换分解(Decomposing Complex Transforms),比如下图中的正方形,我想让他绕 c 点旋转,那就可以先将 c 点平移回原点,再将正方形旋转,然后乘上刚才平移的逆矩阵,就可以实现了;
- 组合变换(Compose Transform)
- 表现为矩阵相乘,会发现,变换的顺序不同,变换的结果也不同,这一点对应了之前矩阵乘法不满足交换律的知识(用矩阵去代表图形变换很巧妙,变换和数学意义有很多是一一对应的);
- 用矩阵乘法表示变换时,应用变换的方向是 从右向左 的;
- 变换可以组合多个;
3D 变换(3D Transforms)
- 齐次坐标
- 三维增加了一个维度,但各种变换与二维情况下并无区别,向量就可以表示为
 ,点表示为
,点表示为 ;
; - 矩阵表示变为
 ;
; - 平移和线性变换,哪个先进行?在 2D 变换中,我们在推导出需要使用 w 分量之前,数学式是下图,可以发现平移是加法,所以是先进行线性变换,再进行平移;
Lecture 04 Transformation Cont.
题外话
- 旋转矩阵逆变化的推导
- 旋转矩阵的公式是这样的:
 ;
; - 它的 逆矩阵 就是旋转 -θ 度,可以表示为:
 ,这是因为把 -θ 代入后,由 cos(-θ)=cosθ、sin(-θ)=-sinθ 两个公式可以推导出;
,这是因为把 -θ 代入后,由 cos(-θ)=cosθ、sin(-θ)=-sinθ 两个公式可以推导出; - 而旋转矩阵的 转置矩阵 ,也是这样表示:
 ;
; - 可以得出一个定理, 旋转矩阵的逆矩阵跟转置矩阵相同;
- 在数学上,逆矩阵等于转置矩阵的情况,有一个专门的名词表示: 正交矩阵 ;
3D 变换(3D Transforms)
- 书接上回
- 3D 缩放 :很简单,加一个坐标
 ;
; - 3D 平移 :很简单,加一个坐标
 ;
;
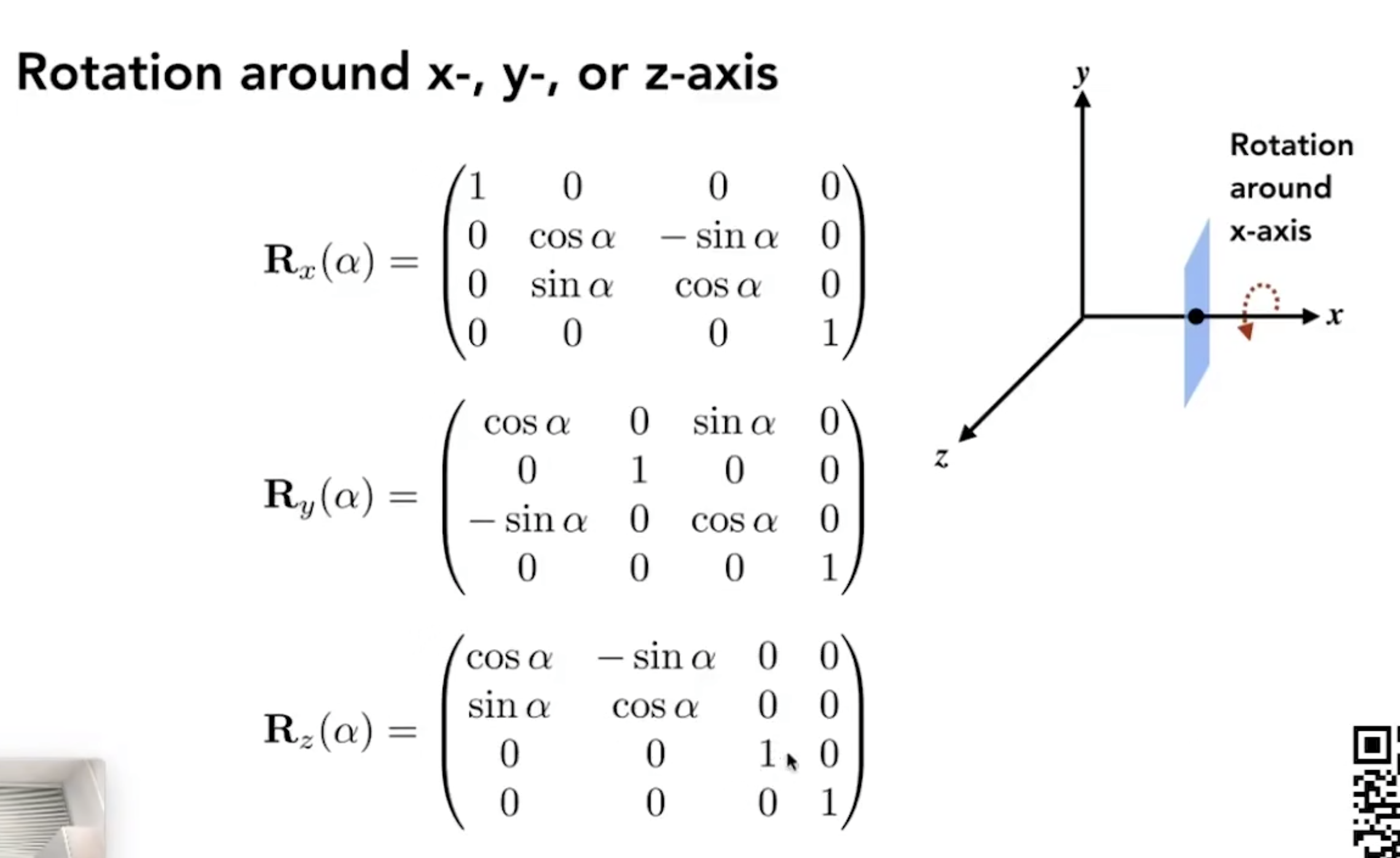
3D 旋转(3D Rotations)
- 先按照 2D 上的情况来拓展
- 绕 x 轴旋转时,x 轴坐标是不变的,那就将 x 轴所表示的行列忽视掉,设为单位矩阵的形式(1, 0, 0);
- 绕 z 轴旋转同理,将 z 轴的行列去掉;
- 绕 y 轴这里,本质相同,也是将 y 轴行列去掉,但理解上有些不同;
- 如图所示,根据右手螺旋定则,绕 x 轴旋转是从 y 转到 z,它们叉乘之后正方向就是 x 轴所在方向;同理 z 轴也可以这样推出;但 y 轴不同,从 z 轴转到 x 轴,叉乘结果是 y 轴的负方向 ,所以按这个理解,绕 y 轴旋转的变化矩阵就是
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-52'%20x='0'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(759,-150)'%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2212'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMATHI-79'%20x='778'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) ,按上一节的推导,这里的变化矩阵应该是正常 旋转的逆矩阵;
,按上一节的推导,这里的变化矩阵应该是正常 旋转的逆矩阵;
- Rodrigues' Rotation Formula
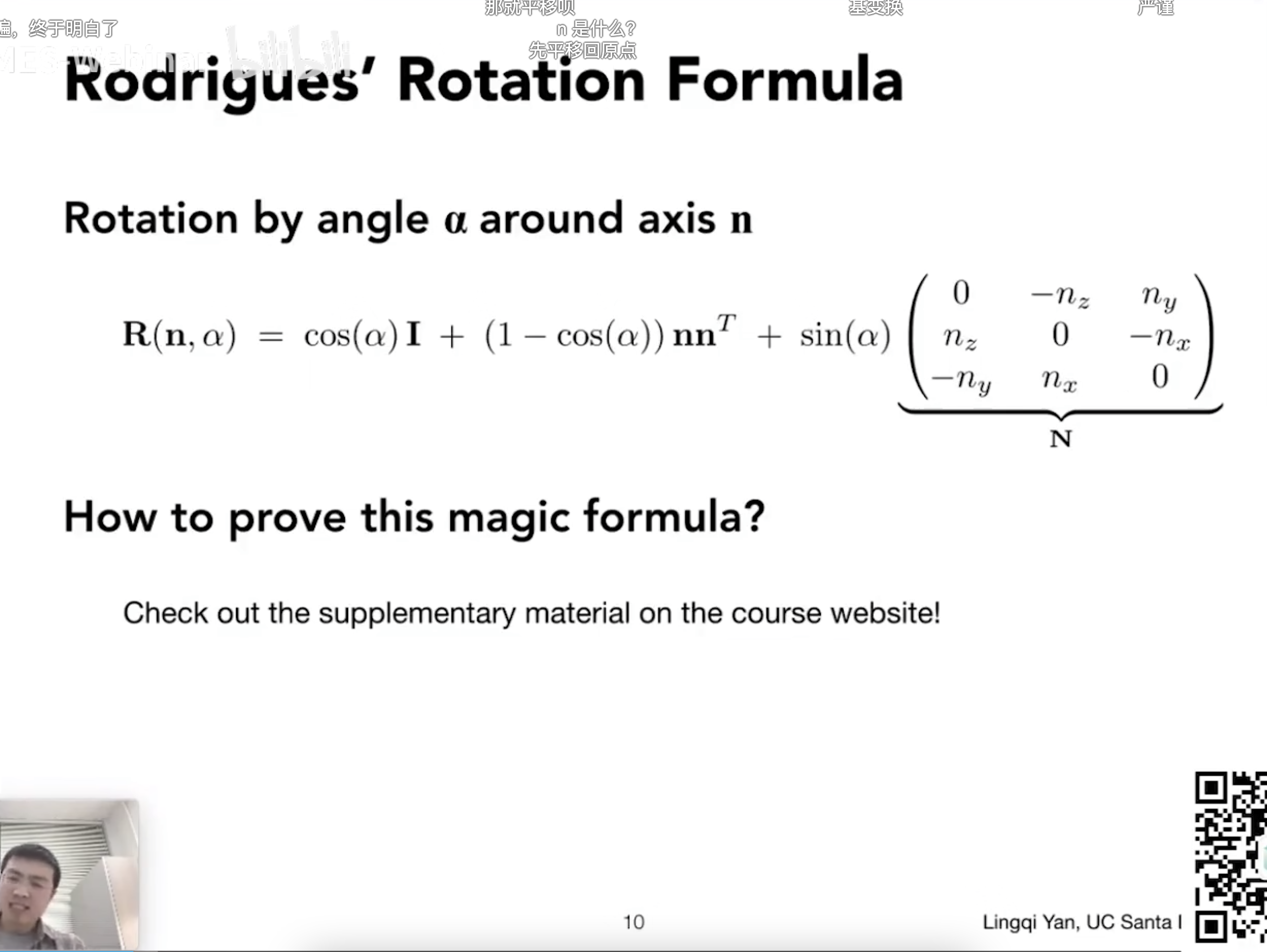
 ;
;- 推导过程很复杂;
- 图中说的 n 轴是指可以只用一个向量表示;
- 如果非要以不过原点的轴旋转,则可以将轴平移到过原点的位置,操作完旋转后,再用平移的逆变换移回原位;
视图/相机变换(View / Camera Transformation)
- 包含 模型变换(Model Transformation)、视图变换(View Transformation)、投影变换(Projection Transformation);
- 定义相机位置:
- 相机位置(Position);
- 观测方向(Look-at Direction);
- 上方向(Up Direction);
- 相机与物体的相对关系:
- 相机与物体的位置是相对的,也就是说同样的变换,摄像机变换和物体变换都能做到相同的效果;
- 因此为了简化理解,则固定摄像机的位置,只变换物体的位置;
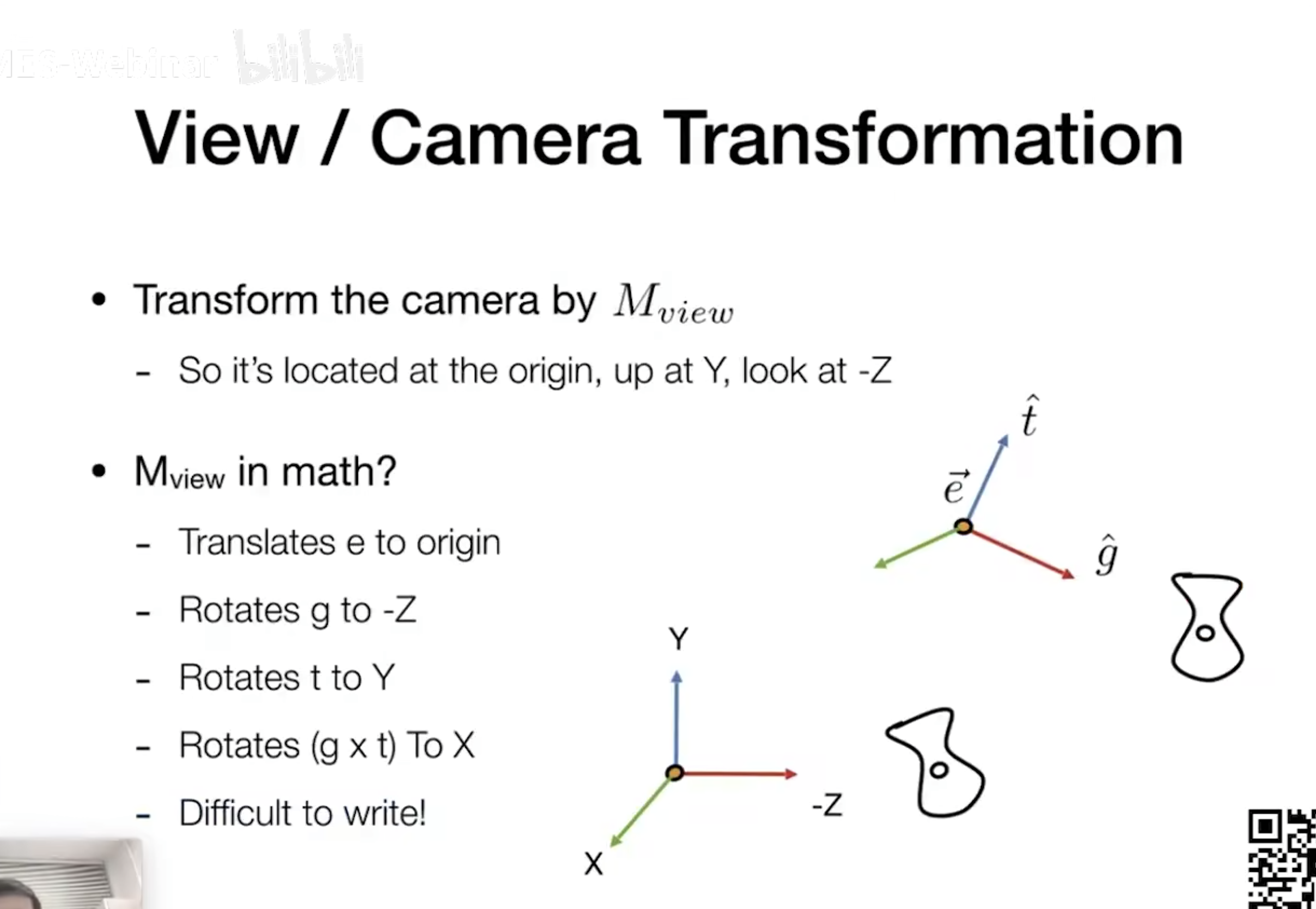
- 默认方向一般是 将相机放在原点位置,以 Y 轴为上方向,-Z 轴为观测方向 ;
- 如果有任意的相机位置,如何将其移到默认位置?
- 将起始点 e 移到原点;
- 将观测方向 g 旋转到 -Z 轴;
- 将上方向 t 旋转到 Y 轴;
- g × t 的方向也会自动旋转到 X 轴上;
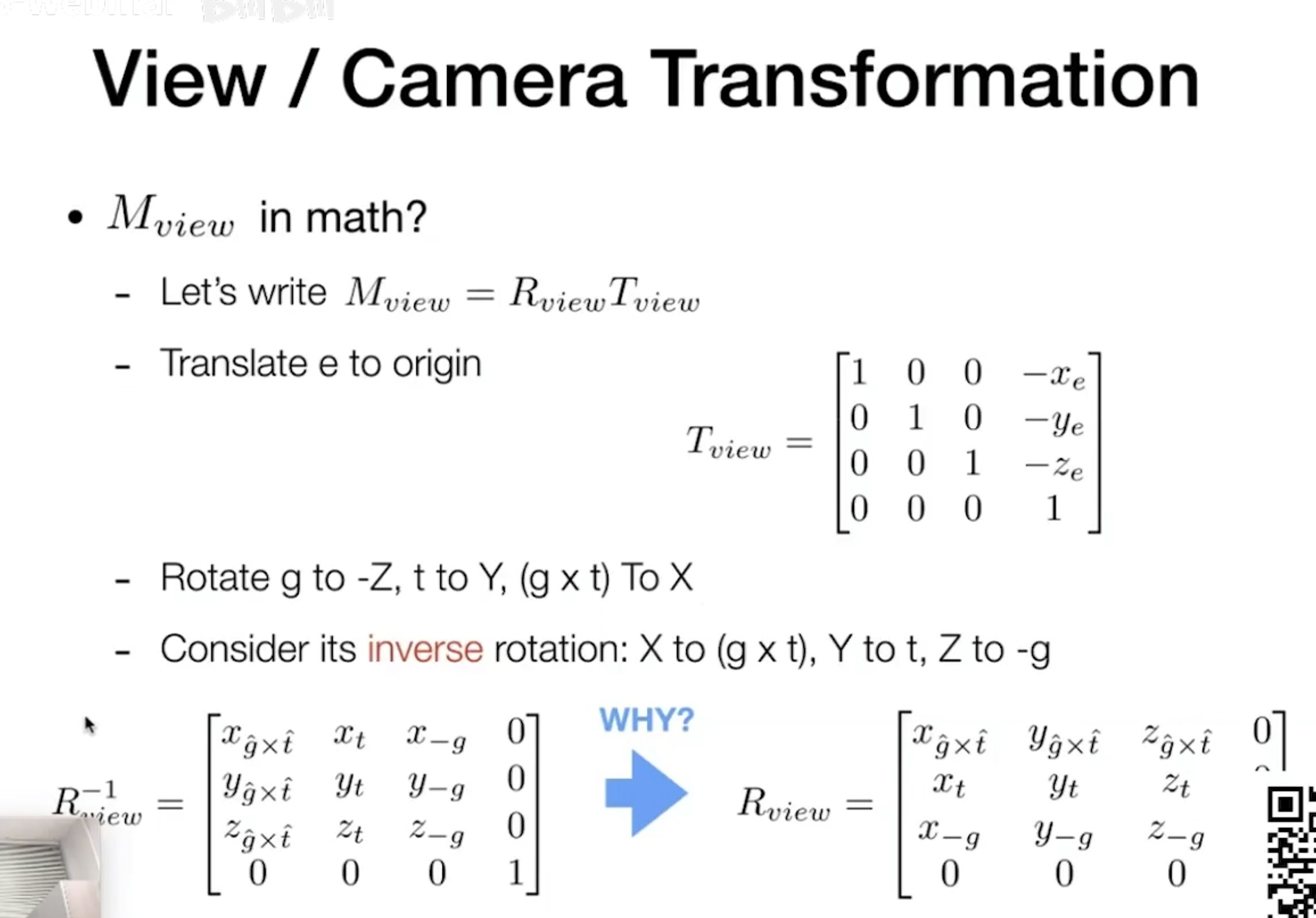
- 4 中的推演如何写成矩阵形式?
- 直接写 g 旋转到 -Z 这种不好写,转换思路,可以把三个变换的逆变换都写出来,比如 -Z 到某某某向量的旋转,这样比较好求;
- 本课之初知道了旋转矩阵是正交矩阵,逆矩阵=转置矩阵,所以可以在求完三个逆旋转之后,求其转置矩阵,再结合上最后的平移变换,就是最终的公式了;
- 先求旋转逆矩阵:
 ;
; - 求转置矩阵,得到正确的旋转矩阵:
 ;
; - 最终再结合上平移矩阵即可;
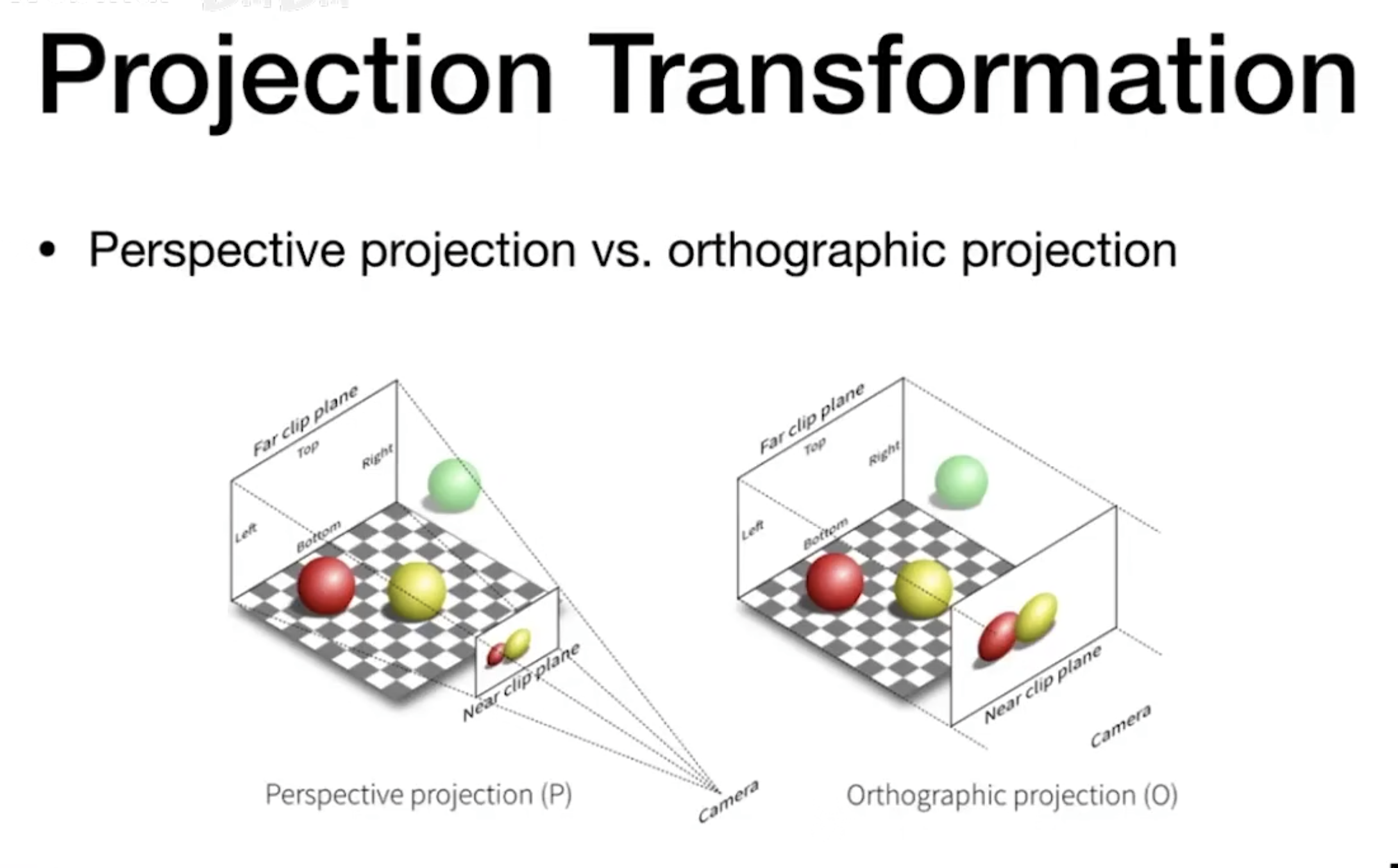
投影变换(Projection Transformation)
- 分为 正交投影(Orthorgraphic Projection)与透视投影(Perspective Projection) ;
- 正交投影不会带来近大远小的现象,透视投影才会;
- 正交投影通常用于工程制图领域;
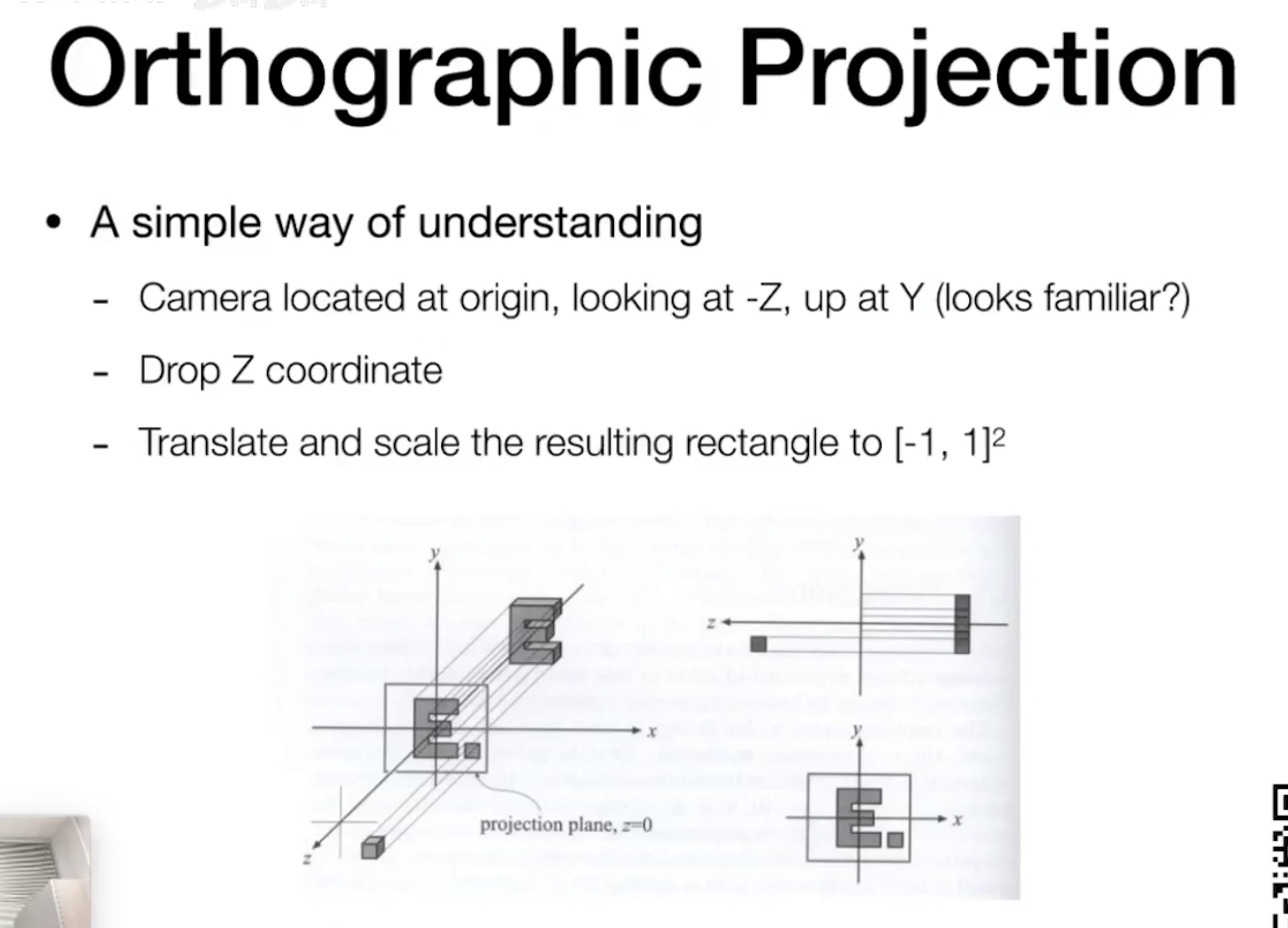
- 正交投影
- 将摄像机放在初始位置(原点、观测方向为 -Z、上方向为 Y);
- 在正交投影下,这样就可以忽视掉 Z 轴的存在,因为 z 坐标怎么变投影结果都是一样的;
- 将 Z 轴扔到不便数学表达;
- 下面需要找一种容易描述的方式;
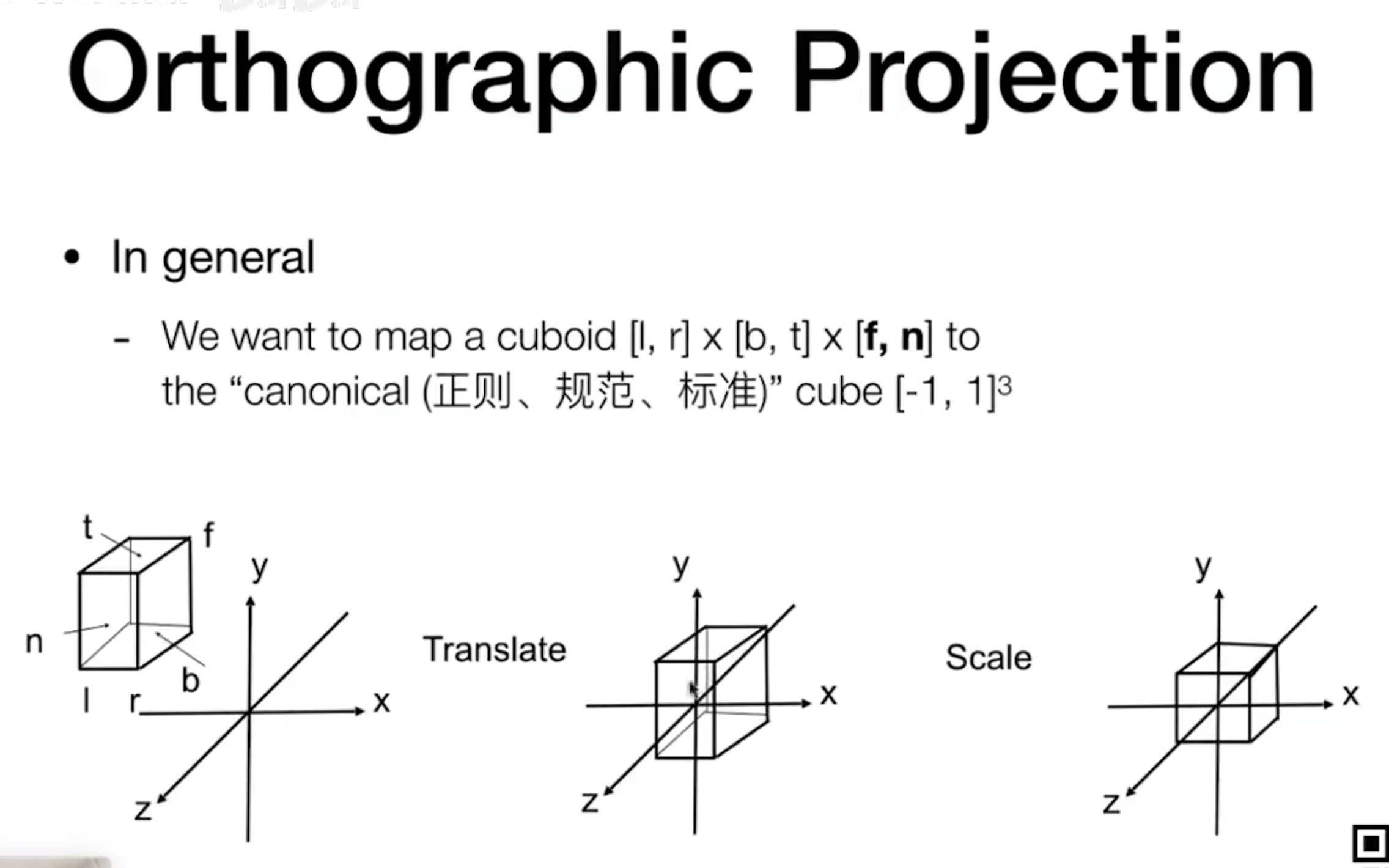
- 通常我们会将一个长方体映射到一个 标准立方体(Canonical Cube) 上;
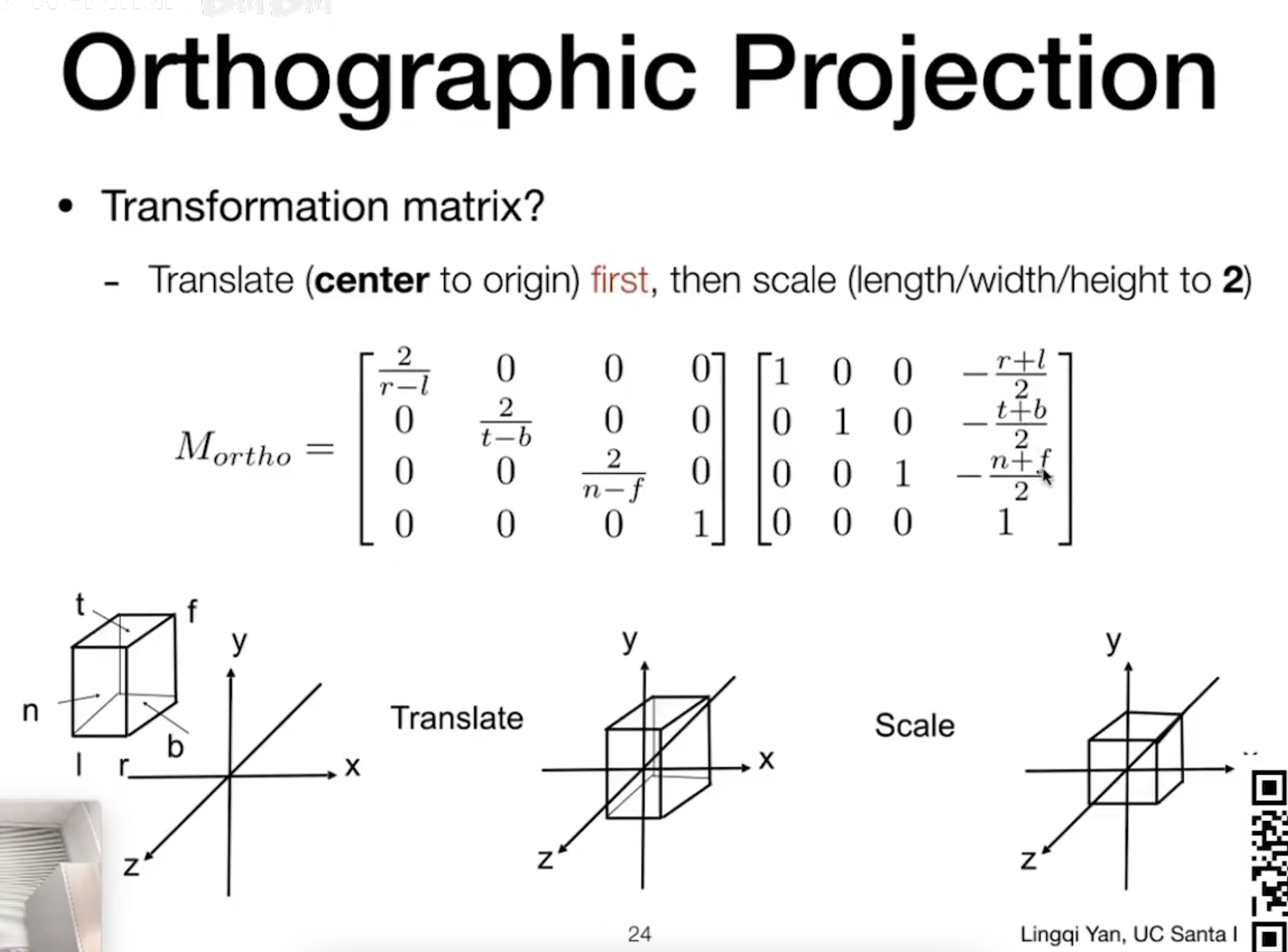
- 先将中心点移到坐标系原点,然后再将各边拉伸到 [0, 1]、[0, -1] 等位置;
- 这里的 [l, r]、[b, t]、[f, n] 是指某一个面的中心点,分别对应左右、底顶、远近;
- 数学式包含缩放与平移,非常直观;
- 由于观测方向是 -Z,所以离摄像机近的 z 坐标反而大,所以 n >= f,有些不便理解;
- OpenGL 用左手系,就可以规避这个问题,但是左手系存在别的问题;
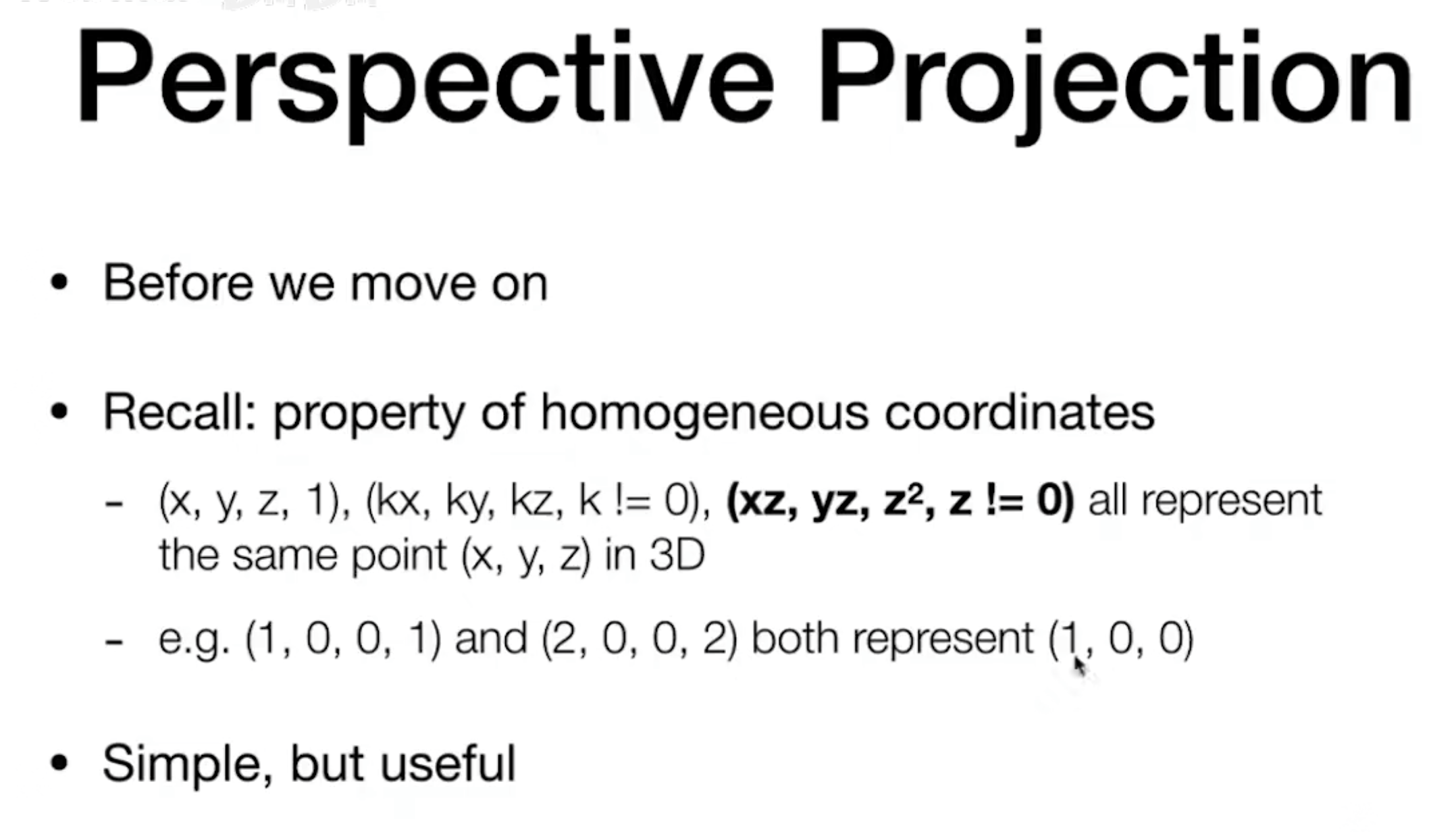
- 透视投影
- 特征:使用最广泛、近大远小、平行线不再平行;
- 复习:齐次坐标中,对所有分量乘同一个数,表示的都是同一个点;
- 如何实现:
- 1)与正交投影一样,定义远近两个平面,但透视投影中,远平面会更大一些;
- 2)将远平面挤压成跟近平面一样的大小;
- 3)再对两个平面做正交投影;
- 这样将透视投影拆分成了两个步骤,更好理解;
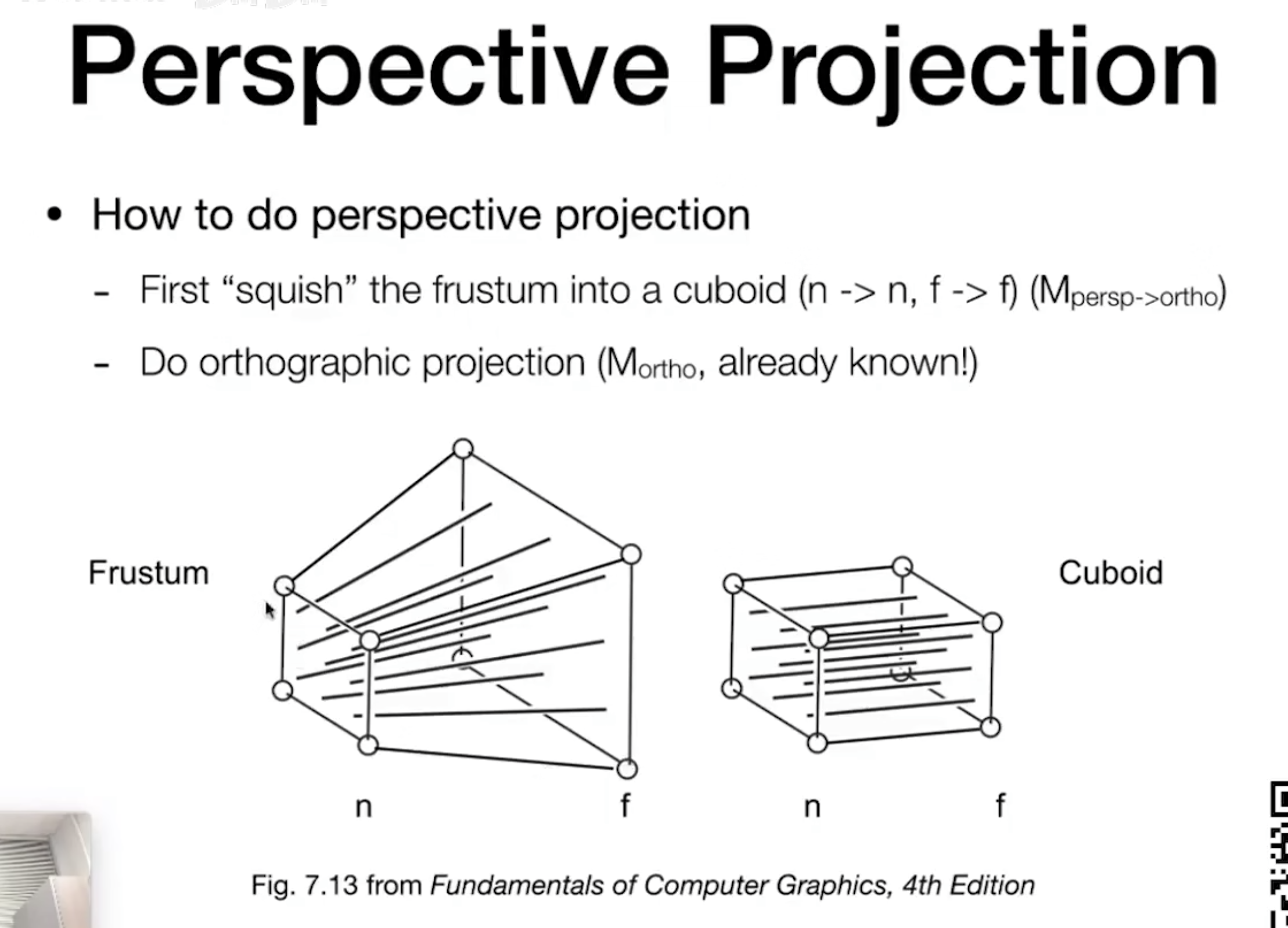
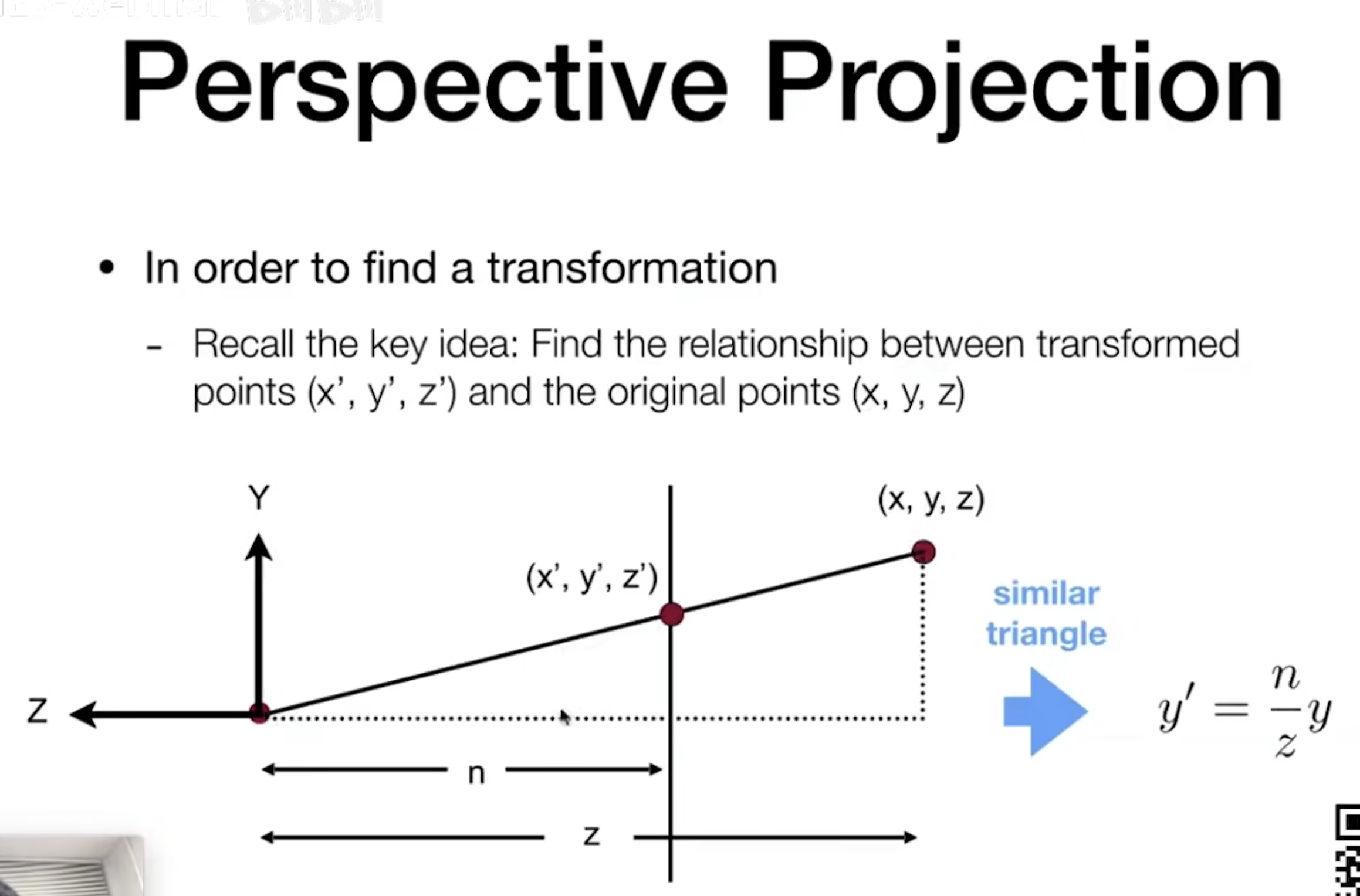
- 看下图,我们的目的是要将远平面压缩成近平面的大小,这样可以构造出一对相似三角形;
- 假设目标平面的 Z 坐标是 n,则两平面 Z 坐标之比为
'%20aria-hidden='true'%3e%3cg%20transform='translate(120,0)'%3e%3crect%20stroke='none'%20width='720'%20height='60'%20x='0'%20y='220'%3e%3c/rect%3e%3cuse%20xlink:href='%23E1-MJMATHI-6E'%20x='60'%20y='676'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-7A'%20x='126'%20y='-686'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) ;
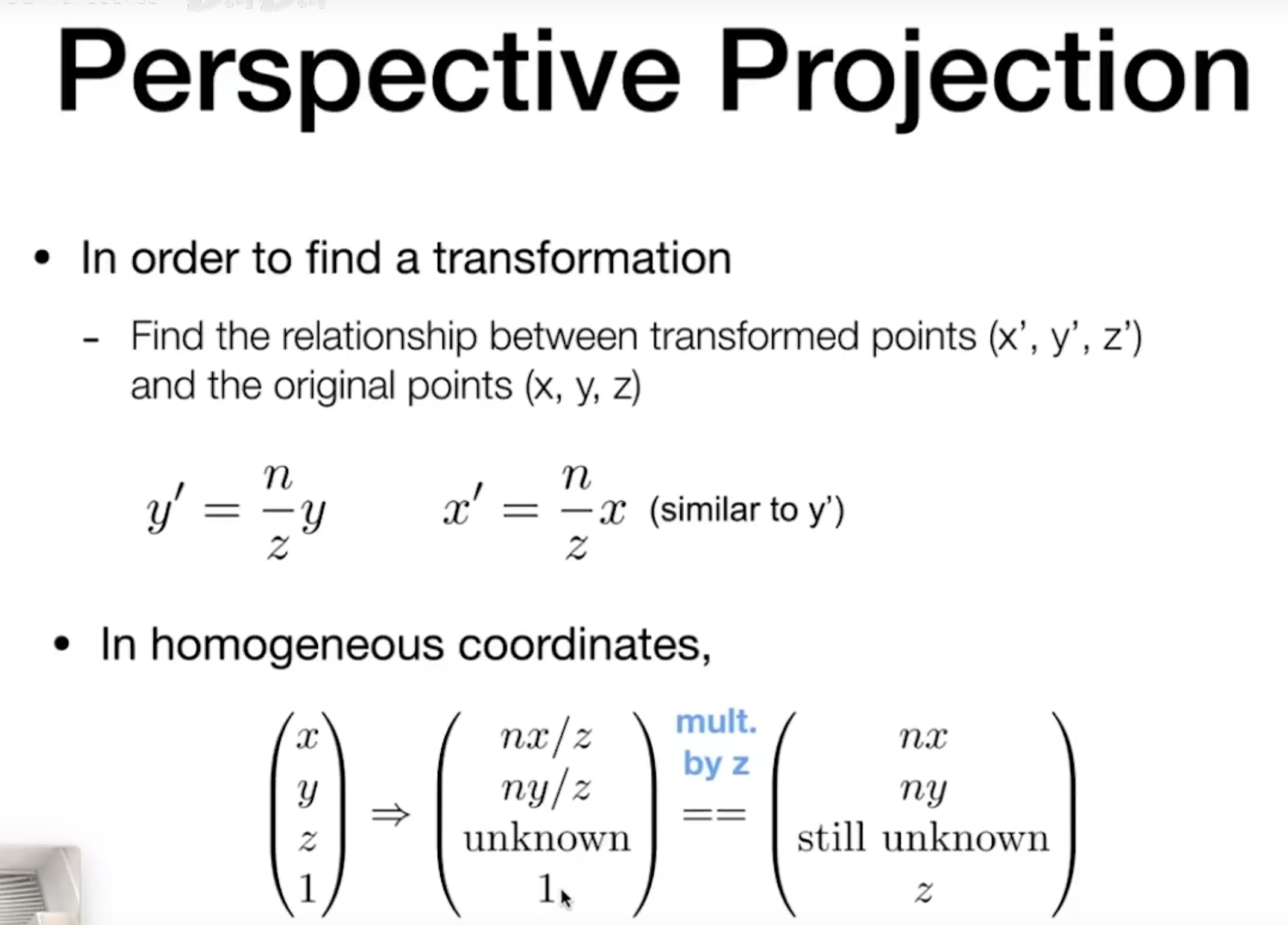
; - 相似三角形各边之比相等,因此
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2032'%20x='809'%20y='583'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1145'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(1923,0)'%3e%3cg%20transform='translate(397,0)'%3e%3crect%20stroke='none'%20width='720'%20height='60'%20x='0'%20y='220'%3e%3c/rect%3e%3cuse%20xlink:href='%23E1-MJMATHI-6E'%20x='60'%20y='676'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-7A'%20x='126'%20y='-686'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMATHI-78'%20x='3161'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) 、
、'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-2032'%20x='706'%20y='583'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1072'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(1850,0)'%3e%3cg%20transform='translate(397,0)'%3e%3crect%20stroke='none'%20width='720'%20height='60'%20x='0'%20y='220'%3e%3c/rect%3e%3cuse%20xlink:href='%23E1-MJMATHI-6E'%20x='60'%20y='676'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-7A'%20x='126'%20y='-686'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3cuse%20xlink:href='%23E1-MJMATHI-79'%20x='3089'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ;
;
- 把 x, y, z 表示为齐次坐标中的一个点
 ,按照上面的推断可得
,按照上面的推断可得 ;
; - 在齐次坐标中,四个分量同时乘同一个数,仍是同一个点,因此得到
 ;
; - 所以可以知道,如果要把远平面的点投影到近平面的点,就可以通过乘上
 矩阵实现;
矩阵实现; - 这样就可以推断,等于
 ;
;
- 接下来是两个观察:
- 近平面上的点,挤压完仍是同一个点;
- 远平面上点的 z 坐标,挤压完仍是不变的;
- 近平面: 如果有一个近平面上的点,它就可以这样转化:
 ;
; - 将这个特殊的 case 代进之前的矩阵公式中:
 ;
; - 对照乘积中的
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-6E'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-32'%20x='849'%20y='583'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ,可得矩阵第三行会是 (0, 0, A, B),之所以有 A、B 是因为无法确定如何组合出;
,可得矩阵第三行会是 (0, 0, A, B),之所以有 A、B 是因为无法确定如何组合出; - 这里推出的公式可以简化为:
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-6E'%20x='750'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2B'%20x='1573'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-42'%20x='2573'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='3611'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(4667,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-6E'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-32'%20x='849'%20y='583'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) ;
; - 远平面: 这次的特殊 case 是远平面的中心点,它挤压之后所有坐标都不会变;
- 可得推论:
 ;
; - 代入矩阵公式,顺便简化一下得:
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-66'%20x='750'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2B'%20x='1523'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-42'%20x='2523'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='3561'%20y='0'%3e%3c/use%3e%3cg%20transform='translate(4617,0)'%3e%3cuse%20xlink:href='%23E1-MJMATHI-66'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20transform='scale(0.707)'%20xlink:href='%23E1-MJMAIN-32'%20x='804'%20y='583'%3e%3c/use%3e%3c/g%3e%3c/g%3e%3c/svg%3e) ;
; - 结合两个公式解得:
'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-41'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1028'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-6E'%20x='2084'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2B'%20x='2907'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-66'%20x='3908'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) 、
、'%20aria-hidden='true'%3e%3cuse%20xlink:href='%23E1-MJMATHI-42'%20x='0'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-3D'%20x='1037'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMAIN-2212'%20x='2093'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-6E'%20x='2872'%20y='0'%3e%3c/use%3e%3cuse%20xlink:href='%23E1-MJMATHI-66'%20x='3472'%20y='0'%3e%3c/use%3e%3c/g%3e%3c/svg%3e) ;
; - 所以最终的矩阵就是:
 ,这样就将透视投影的公式变成只关于近平面和远平面的 z 坐标了;
,这样就将透视投影的公式变成只关于近平面和远平面的 z 坐标了; - 别急,只是做挤压的矩阵,挤压完还要做正交投影才是最终结果;
- 加上正交投影应该是这样:
 ;
; - 作业: 对于 z 在 n 和 f 中间的一个点,比如 (n+f)/2,它在挤压后是离远平面近还是近平面近?